

 QQ
QQ
阀门定位器实现了阀门自身阀位调节的闭环负反馈控制,使控制回路形成以被控对象的过程变量控制为主回路,阀门自身阀位控制为副回路的“串级控制”。其控制方框图如图 1

图1 控制方框图
1、气动阀门定位器工作原理
气动阀门定位器基于力平衡控制原理,主要包括:力矩控制系统(由波纹管、杠杆2、喷嘴-挡板、气动放大器等部件组成)和平衡力矩负反馈系统(由摆杆、轴、偏心凸轮、滚轮、杠杆1、弹簧等部件组成),其结构原理如图2
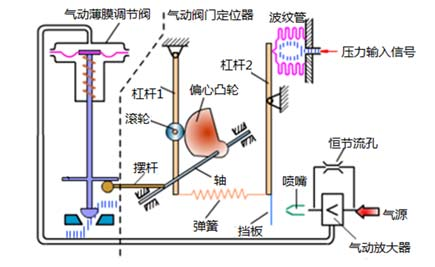
图2 气动阀门定位器工作原理
当输入波纹管输入压力控制信号增大时:
①杠杆2 绕支点转动,档板靠近喷嘴,喷嘴背压增大,并经气动放大器放大后进入执行机构气室,使调节阀向下动作
②调节阀阀杆带动反馈杆(摆杆)绕支点转动,偏心凸轮逆时针转动,通过滚轮使杠杆 1绕支点转动,并将反馈弹簧拉伸
③弹簧对杠杆 2 的拉力与波纹管的压力达到平衡时,阀门处于稳定状态,此时输入压力控制信号与阀门位置相对应
喷嘴-挡板作为阀位定位器的重要部件,具有信号转换、信号放大和控制作用。喷嘴-挡板可看作由恒气阻R1(恒节流件)、变气阻R2(喷 嘴、挡板)、气室组成。其结构原理如图 3。
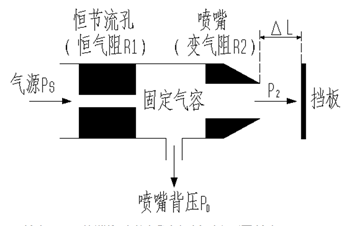
图3 喷嘴-挡板结构原理图
挡板与喷嘴之间的距离△L 发生变化时,喷嘴-挡板将距离信号转换成固定气容(室)及喷嘴背压的压力信号,即△PD=△L
由于喷嘴孔的口径远大于恒节流孔和背压孔的口径,喷嘴-挡板能将挡板微小的位移信号 进行放大,提高控制精度和灵敏度,即△PD/△L=k,k 值非常大
2、电气阀门定位器工作原理
电气阀门定位器同样基于力平衡原理,通过喷嘴-挡板进行力矩控制,采用机械连杆实现力矩反馈。相比气动阀门定位器,电气阀门定位器利用永磁铁作为力矩马达,通过电磁作用力实现输入电信号与喷嘴-挡板位移信号的转换。其结构原理如图 4

图4 电气阀门定位器结构原理图
3、智能电气阀门定位器工作原理
传统电气阀门定位器基于机械力平衡控制原理,而智能电气阀门定位器采用微处理器进行控制,同时将阀杆位移转角转换成滑线电阻的阻值,从而实现阀杆位移电反馈,具有控制精度高,调试方便等优点。其控制方框图如图 5

图5 智能电气阀门定位器控制方框图
智能电气阀门定位器根据 I/P 转换器的型式可分为:喷嘴-挡板式和压电阀式
压电阀式智能电气阀门定位器利用压电陶瓷片的压电效应,采用两位开关控制进气压电阀和排气压电阀的打开或关闭来实现阀位控制。稳态工况下,阀门不消耗仪表空气,具有耗气量小的优点,但在以往实际项目应用中有出现过振荡 的现象,其五步开关(快开、慢开、死区、慢关、快关)程序控制算法也在不断优化中。其结构原理如图 6。”

图6 压电阀式智能定位器结构原理图

图6 压电阀式智能定位器结构原理图
